Unit 1 was the Study of Kinematics, Kinematics includes the following topics.
Terminology:
- Position - The Location of an abject in space
- Distance - How far the object has traveled
- Displacement - The distance from the origin (Starting point)
Interpreting Position Time Graphs:
- A position Time Graph is is a graph where position is on the Y axis and Time on the right, this graph tells you the position of an object at a particular time.
- The slope of this graph tells you the velocity
- If the slope is flat that means the object is not moving.
- If the slope in linear this means that velocity is constant.
- If the slope is non-linear this means that velocity increases at a non constant rate
- If the slope is negative this means the object is moving in a negative direction
- To find average velocity, simply get the last point (Vf) and subtract by the first point (Vi) and divide by the change in time.
- Just look at the slope to find the velocity.
Interpreting Velocity Time Graphs:
- A Velocity Time graphs gives you the Velocity an object is going at a certain point in time.
- The slope of a Velocity Time Graph gives you acceleration.
- A linear slope indicates a constant acceleration
- If the slope increases at a non linear rate, can conclude that this means that the acceleration increases at a non constant rate.
- If the slope is negative it can have two different meanings
- If the line is above the x axis that means the object is slowing down
- If the line is below the the x axis that means the object is accelerating in the negative direction.
- A general rule of thumb is that as the line gets closer to the x axis it means the object is slowing down
- If the line goes along, or even momentarily intersects the x axis, that means it stopped/wasn't moving.
Determining acceleration and starting velocity from a Position Time Graph:
- To find the starting/initial velocity from a position time graph, you must look at the slope when t=0, often this will be zero as at t=0 the object has not yet started to move.
- To find Acceleration, you must take the derivative of the position time graph, this concept is explained by the following YouTube video.
- https://youtu.be/doEfg1TRQiU
Determining Position, Distance and Displacement from a Velocity Time Graph
- To determine Position from a Velocity time graph you simply have to find the Velocity at that time and multiply by that time.
- If that velocity is not constant, just create a triangle with the graph, and find area to get position
- To determine distance of a velocity time graph, just split the area beneath the graph into rectangles and Triangles then find area, after that simply add together to find distance
- To find displacement, subtract area of graph underneath the x axis to find displacement.
- Video for Position https://youtu.be/bLbU03r-n8w
- Video for Distance/ Displacement https://youtu.be/6-N2bTIf1Sg
Connecting representations of motion: x-t graphs, v-t graphs, strobe diagrams:
- The Connection between an x-t (Position/time) graph and V-t graph, is that v-t graphs are the derivative of x-t graphs.
- For example, if the graph of the x-t is a quadratic the v-t graph will be a linear, if x-t is a linear, v-t is a flat line.
- Strobe Diagrams are used to show change in position over time. As the arrows get bigger the change in x (position) gets bigger.
- Each Arrow represents a second, and so you can graph strobe diagrams as x-t graphs as shown in this video https://youtu.be/ypirPQketJs
- Once you create the graph of the x-t from the strobe, you can derive the v-t graph from it
Solving Problems using constant velocity and uniform acceleration models:
- In these types of problems, there is a set procedure.
- First find acceleration and from there how far someone goes while accelerating
- After that, they reach their final velocity
- Question like these involve using the three Kinematic equations to try and find out one variable at a time.
- Examples: https://youtu.be/uZGpICLugsA, https://youtu.be/zp-37ifuQQs
Projectile Motion:
- Projectile motion describes the motion of an object while it is being projected through air.
- Projectile motion has two main motion, horizontal and Vertical.
- In order to solve these you will need to analyze graphs to see x/y values
- Also, it is important to know that g = -9.8m/s
- More on this here: https://openstax.org/books/university-physics-volume-1/pages/4-3-projectile-motion
Unit 2: Forces
- The Unit of Forces provided a basic overview of Dynamics. Dynamics mostly deals with forces and how each respective force causes s different type of movement.
Newton's Laws:
- Newtons first Law: Newtons first law simply states that an object would continue to move at a constant velocity, unless the object feels an unbalanced push or pull.
- Newtons second Law: Newtons Second law simply states that acceleration is directly proportional to net force, and is inversely related to mass, thus forming the a=(Fnet/m)
- Newtons Third Law: Newtons Third Law simply states that each force applied has a reaction which is equal in magnitude, and opposite in direction. Example of a third law pair is the Force of Gravity and the Normal Force.
Identifying Interactions: System Schemas and Force Diagrams
- System Schemas and Force Diagrams are imperative parts for solving force problems in physics
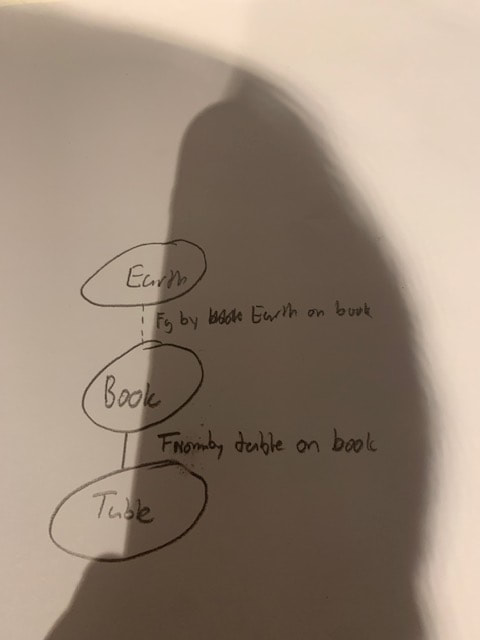
- The System Schema: The System Schema is a diagram which allows the problem solver to see all of the Objects and the forces in the situation. You can write the objects into a bubble. In order to show a force that is acting on an object by another object you must draw either a dotted or solid line. If the force exerted is a non-touching force than draw a dotted line, if the force is a touching force than draw a solid line. Below is the System Schema for the following situation. A book is resting on a table.
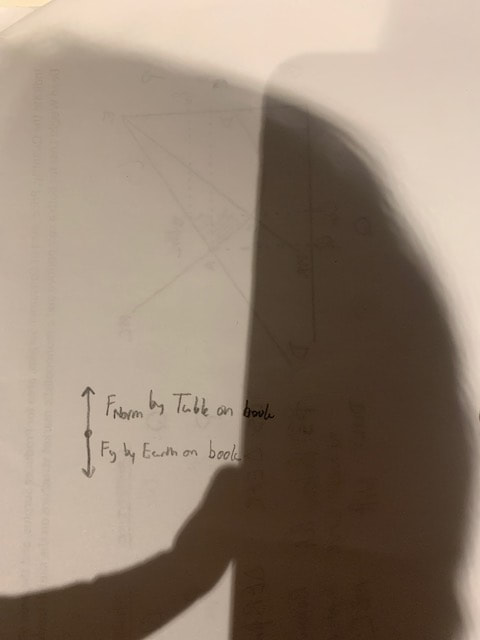
- The Force Diagram: The force diagram is similar to the System Schema, except in a force diagram it places more emphasis on the central object (Objects which the forces are acting on), and it also allows you to see what direction each force is moving in. Drawing two vectors in opposite directions, but of the same length, indicates that the forces indicated by that pair of Vectors is indeed balanced. You do not need to indicate touching/non-touching forces with either a solid or dotted line, just use a vector. The force diagram below models the same situation as above (Note: the small dot represents the book in this instance, but generally represents the central object.
Force Calculations:
Force Problem Solving:
Relating Representation of Motion and Force Problems:
- You can find the main forces in any problem using these equations.
- Fg=mg
- Fnet=ma, or just add up all the forces
- Static/Kinetic Friction = mew(Normal Force)
- Tension Force = ma+mg; a = acceleration
- Spring Force = -k(Deltax); k= Spring Constant, Delta x = Stretch
- Other Calculations can be intuitive, such as noticing that Normal force is just the opposite of gravity, so in a situation where Fg and Fn are solely vertical, you can just find the Fg, and multiply by -1. For Example, A 1 kg object will have Fg=-10 (Fg=1(-10)), so therefore the normal force a flat surface will exert on said object will be 10 N
- Extra tips: Horizontal component of Gravity is equal to mg(sin(theta)), Vertical equal to mg(cos(theta)).
Force Problem Solving:
- There are certain steps which you must before starting to solve a problem.
- First: Find out what variables you are given, and what you need to solve for (Write them down)
- Second: See what information you can find based on other variables, for example Fnet=ma, or Fg=mg
- Third: Write down all relevant equations that will help you solve for certain variables needed to solve the main variable
- Fourth: Plug the newly found variables into an equation which expresses your desired variable in terms of the ones you found; and solve
- BONUS TIP: If you are confused draw a force diagram and system schema, possibly even a force table.
- When solving force problems, rarely will you be given the all the forces, you will have to manipulate the equations around to find each force.
- For Example, here are some of my favorite videos regarding problem solving.
- Net Force Calculations: https://youtu.be/tfAJDST3cjo
- Problems involving Friction: https://youtu.be/RIBeeW1DSZg
- Hooke's law problems: https://youtu.be/OmMIOZtM1ks
- Angular Forces: https://youtu.be/ufgY237M5KQ
Relating Representation of Motion and Force Problems:
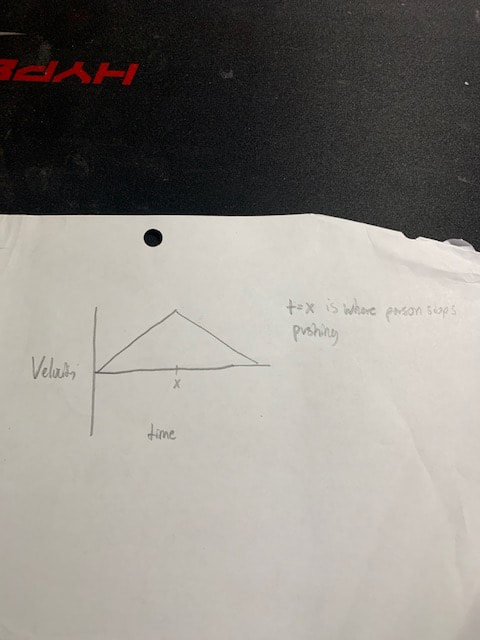
- Besides System Schemas and Force diagram, in Physics it is important to know the importance of drawing a graph based on what you are told. Whether it be a Velocity-time, Position time, or Acceleration time. Here is an example of how to relate force and motion.
- Tip: Remember the relationship between forces, for example as Mass goes up, acceleration decreases and as net force increases acceleration increases, etc.
- Example: Suppose there is a small friction force of about 0.25N on a lab cart as it rolling across the surface. A person pushes the cart to the right to the right with a force of 1.0 N for several seconds, he then stops applying the force, sketch a velocity time graph for the following situation.
Solving problems with Force and motion:
- Solving problems with force and motion are challenging as they delve into 2 topics, Forces and Kinematics. When solving such problems you will find yourself using both force and Kinematic equations.
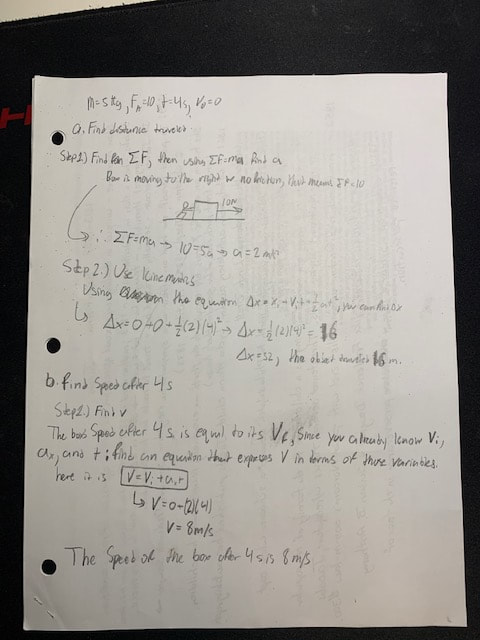
- However, they are not as intimidating as they seem, simply follow the process outlined in the Force Problem solving section when in doubt draw a force diagram. Here is an example.
- Example: A Block of mass 5 kg is sitting on a flat/horizontal frictionless plane. When pushed with a constant/horizontal force of 10.0 N for 4 seconds ----------> Find how far the box went, and it's speed after 4 seconds
- Here is the solution.
Unit 3: Circular motion
- In this unit we look at an objects motion as it rotates in a circular motion. Essentially, concepts applied to linear Kinematics are applied to understand how objects move in a circle, and the force that and object experiences while undergoing circular motion.
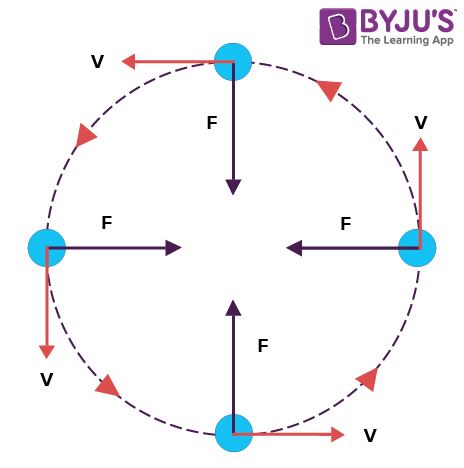
- Uniform Circular motion:
- Uniform Circular motion is described as the motion of an object moving in a circle at a constant speed. Since it is in a circle, the direction of the object is always the tangent of the circle. Velocity also follows the same tangent in this case. The object undergoing uniform circular motion travels at a constant velocity, however, since the object's direction (Tangent) is always changing, therefore, it is accelerating (Acceleration caused by change in direction). In this case the net force acting on the object points towards the center. A centripetal (Center Seeking) force. A visualization of all forces is shown below.
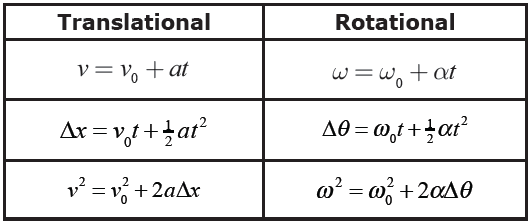
- Calculations:
- In terms of circular motion, the formulas used in Circular motion and Kinematics are extremely similar (Hence why problems involving such formulas are under the label of Rotational Kinematics). All you have to do is replace velocity with angular velocity (Denoted by Omega) and and Acceleration with Angular Acceleration (Denoted by Alpha). A Picture of these equations are provided below. In addition, if a problem asks for an object rotational period the formula is given by T=1/2pi(r).
- A video by The Organic Physics Tutor provides an excellent explanation of how to solve problems involving rotational kinematics by using all of the equations above. https://www.youtube.com/watch?v=0El-DqrCTZM
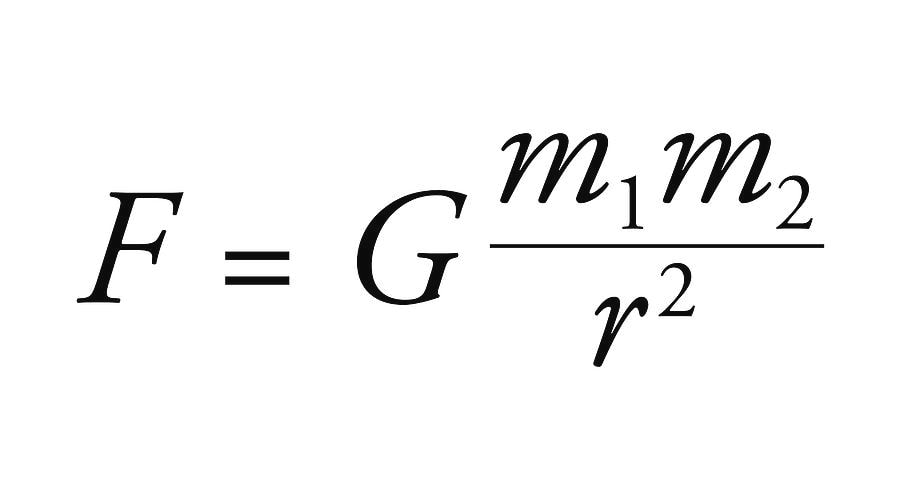
Universal Gravitation:
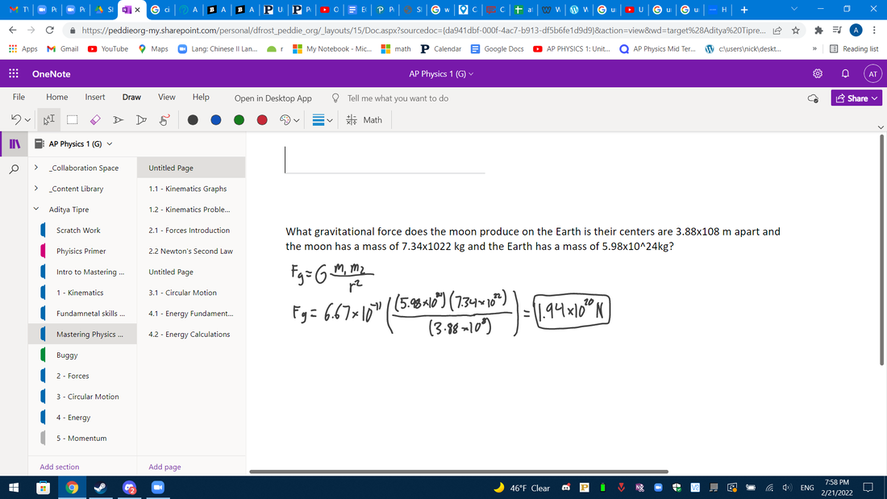
- Usually, for situations that involve gravity or finding the force of gravity, we use g=-9.8 or 9.8 in some cases and Fg=mg. However this formula is not accurate for other systems that do not take place inside the Earth's atmosphere. Therefore, these situations call upon a different equation, Specifically the Universal Gravitation equation (Shown Below). The way the equation is set up is based on the Findings of Isaac Newton. In his work Newton found that each particle attracts each other, this the strength of this attraction (Force) is proportional to the product of the mass of the 2 objects (Denoted by (m1)(m2)) and is inversely proportional to the square of the distance from each others centers (Denoted by r^2). Additionally this equation calls for a new gravitational constant (G) or 6.67x10^-11, this G is accurate for pretty all things (Hence why it is the UNIVERSAL Gravitational constant).
Example Problems:
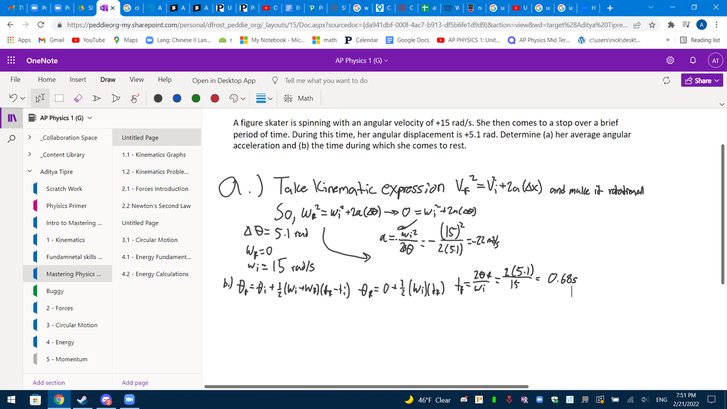
First example = Rotational Kinematics
Second Example = Universal Gravitation
First example = Rotational Kinematics
Second Example = Universal Gravitation
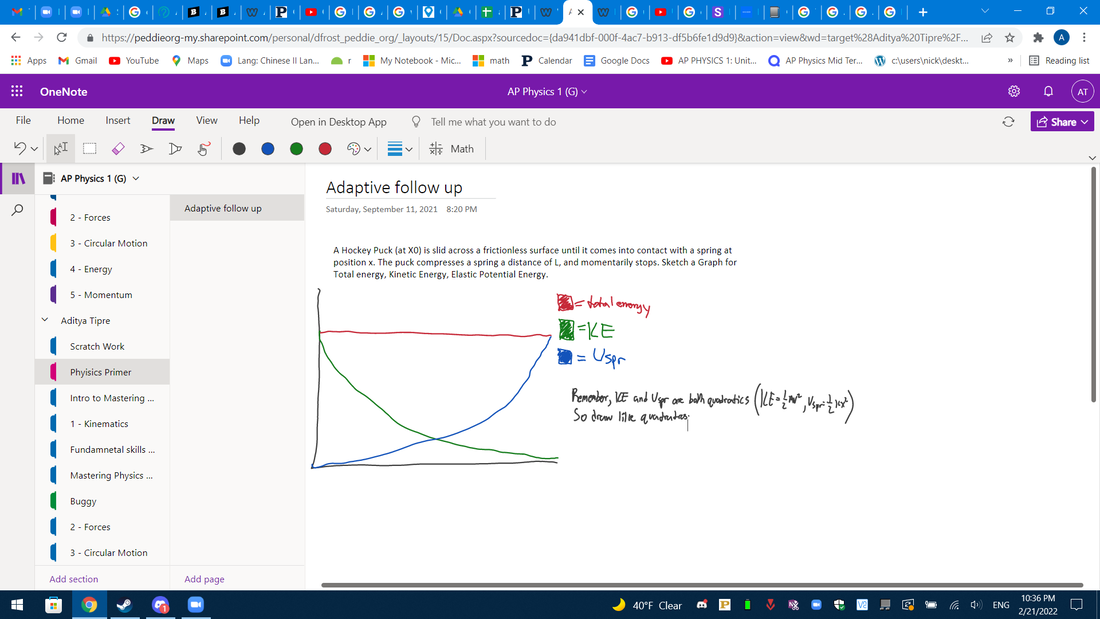
Unit 4: Energy
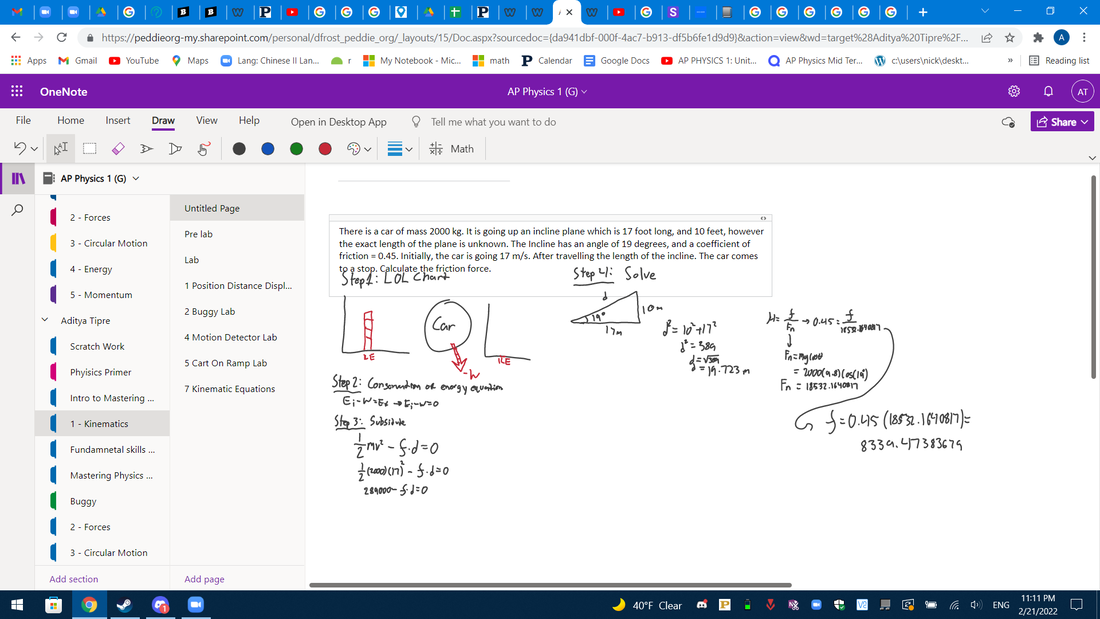
- Essentially This unit dealt with the basics of Energy. Energy is the ability to do work. Work is defined by the a transfer of energy. In this unit we learned how to represent these transfers, through LOL charts and Conservation of Energy Equations.
Representing Energy Transfers Through LOL Charts:
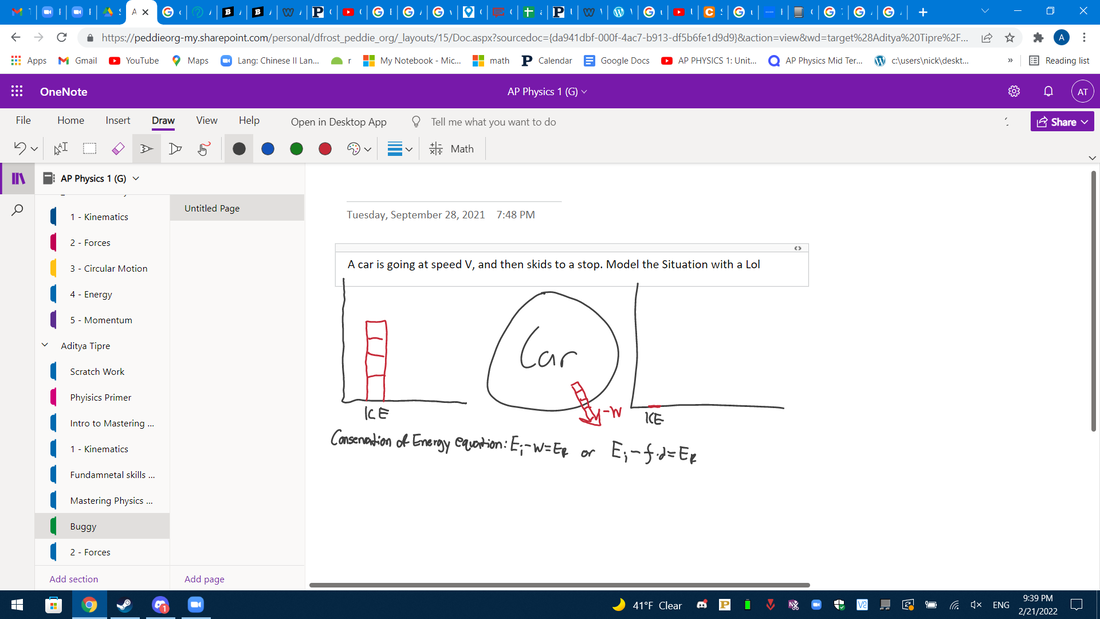
- LOL charts, named after their appearance, are a great way to model Energy transfers. An example of one is shown below. In the first graph, you have you initial energy. So whatever Energy is present in the system initially, should be present in that first graph. In the circle, you must define your system, you can draw arrows going into and out of the circle to represent energy being put in or taken out of the system. In the second graph you have to plot the final energy present in the situation. These LOL charts are a great way to visualize the concept of the Conservation of Energy ( Ei=Ef). An Example is done below.
Work:
- Work is the transfer of energy. Work can be done on a system, and on an object. In an conservation of energy equation the following variables can be used to denote types of work done on a system. W stands for working, Specifically an external push or pull (Force) that has been done on the system. Q stands for heating, or like the amount of Kinetic energy in an object. Tempreture diffrences between a System and its surroundings usually cause a heat to flow from hotter to colder objects. R stands for radiating, like a piece of matter that is losing mass by radiation ( Uranium for example ). Depending on the situation you could use any of the variables to represent conservation of energy. Work is measured in Joules.
- If you want to calculate work the formula is W=ForcexDistance (Commonly written as W=Fd). If you want to measure work done on an angle the Formula is W=Fd(Cos(Theta)).
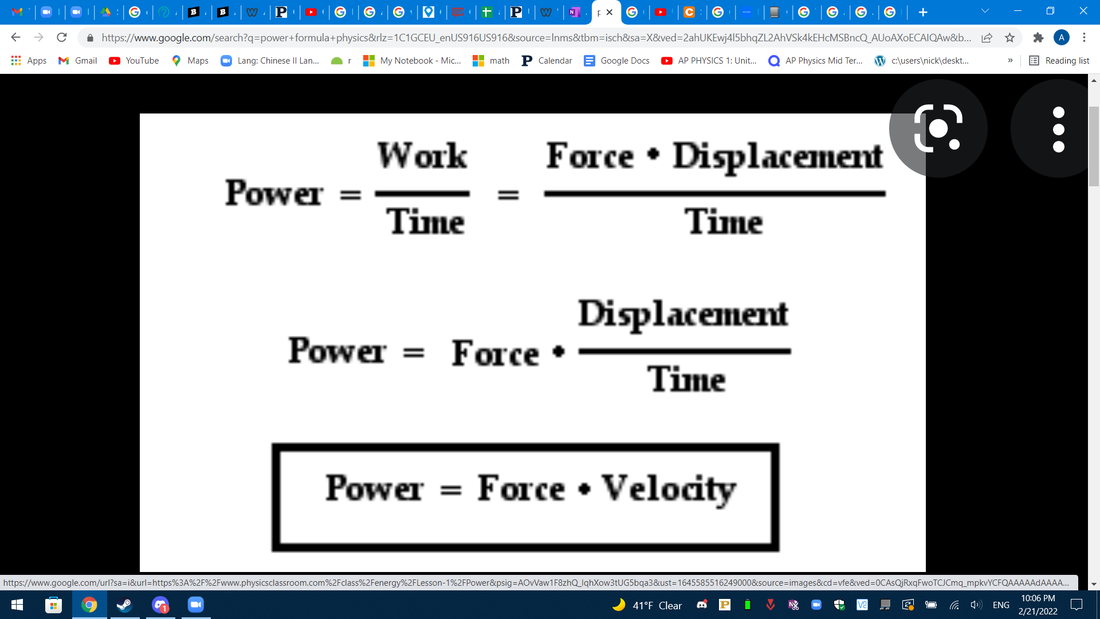
Power:
- Power is the rate at which work is being done. In calculus terms, work is the derivative of work with respect to time. And as denoted in AP Physics 1 Power =Work/ Delta t. Power is measured in watts. More clear versions of the power formula included below.
- Connecting Work, Energy, and Power to Forces and motion:
- In order to move an object which is standing still, you need to apply and unbalanced push or pull on the object (AKA Force). When you apply that force, you see many different transfers of energy happening, in the form of the gain of Kinetic Energy, And presence of Kinetic Friction. The Work done by Kinetic friction turns the KE in heat. And the work that your are doing on the object over the amount of time you are applying the work = your Power.
- Connecting Representations of Motion with Representations of Forces with Representations of Energy
- In Order to connect representations of motion and forces to energy, you have to think about how they relate to each. If a force of N causes an objects V to go from v0 to 3v0 then that force caused the objects KE to go from 1/2m(v0)^2 to 1/2m(3v0)^2. That is how must think in order to relate the two. The idea is to see how a certain force, impacts velocity or mass or stretch and plug those new values into the Potential energy equations (Shown Below example Problem). Here is the example problem.
Force Problem Solving:
- When Solving force problems, there is a simple procedure you need to follow.
- Start By creating and filling out a bar chart
- Based on the Bar chart create a conservation of energy equations
- Fill in the appropriate substitutes for Ei W,Q, or R and Ef
- Solve
- EXAMPLE.
Unit 5: Momentum:
Collisions:
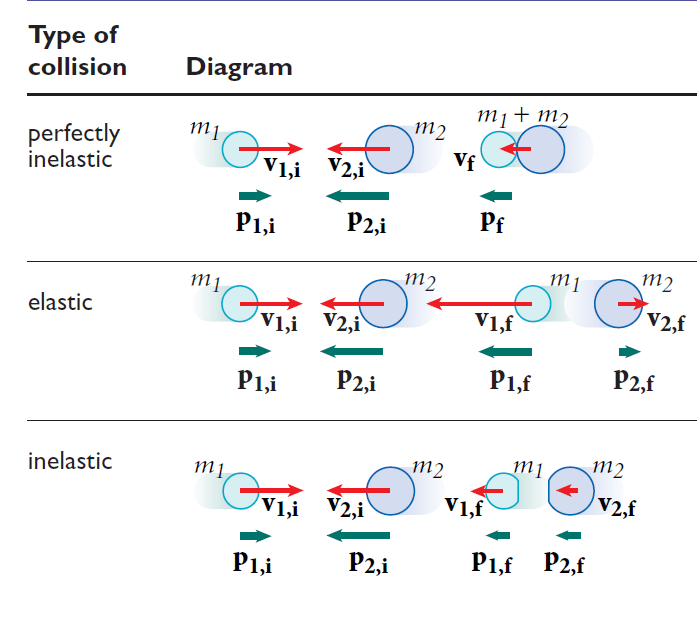
- Collisions are a good way to see how conservation of momentum occurs. A collisions is when 2 bodies move towards each other and eventually bump into each other, exerting an equal and mutual force on one another. There are 4 different types of collisions.
- Perfectly Inelastic collisions: The simplest kind. In these situations, the two masses collide and stick together, becoming one singular object, with a singular velocity. Momentum is conserved, however Kinetic energy is lost. An Example of this, would be firing a bullet into a block with such a density that the bullet does not re-emerge out the other side. Hence, the two objects become one. The block slides to stop. Momentum is conserved, how the kinetic energy is lost.
- Inelastic: This type of collision is similar to Perfectly inelastic. In that Momentum is conserved and Kinetic Energy is lost. However, in these situations two objects collide, but do not become a singular objects. Hence why the two objects have different final velocities after the collision. Going back to the bullet example. Suppose a bullet fired at a speed of 200 m/s into a block with 1/4 of the density of the previous block. The bullet passes straight through, however it has a final velocity of 100 m/s. The block slides 4m before coming to a stop. Momentum is conserved, Kinetic energy is lost, the objects stay separate, and both have their own different final velocities.
- Elastic: Two objects collide, but there is no deformation present. More over there is lost of kinetic energy. Therefore, Law of Conservation of Energy (Ei=Ef), and Conservation of Momentum holds (Pi=pf).
- Explosions: Explosions are basically the opposite of Perfectly Elastic. A singular objects splits into two. Kinetic Energy is gained. However, the momentum of an objects center of mass remains unchanged. (BONUS: Center of Mass = location where you would need to support an object to balance it)
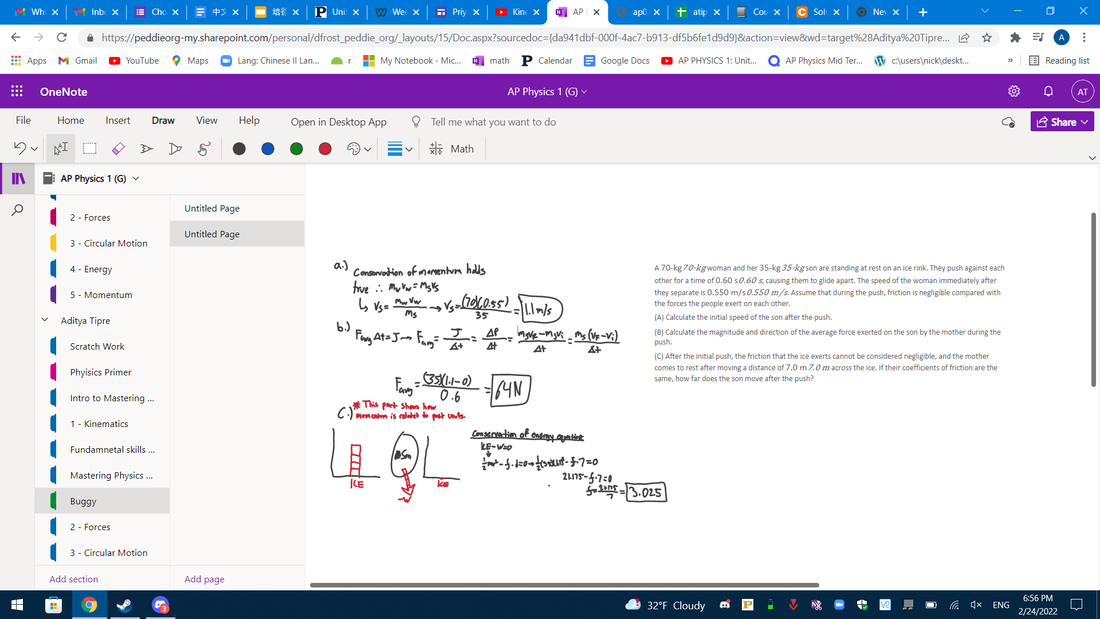
Momentum:
- A vector quantity, often described in physics as Mass in motion. The momentum of an object, ultimately means how hard it is to stop. The formula for momentum is P( Variable for momentum ) = m (mass or inertia) x v. Similar to energy, Momentum also has it's own law of conservation (pi=pf). It also has its own chart used to represent ( Called LIL Charts).
LIL charts:
- LIL charts are a way to represent how momentum is conserved. In the first graph, you plot the initial moment the objects of your system. (FYI, Conservation of momentum only applies if the system contains all the objects in the scenario). In the middle part (The "I"), you can plot any impulse (Change in p) which occurs in the situation. In the last graph, you plot the final momentum of your objects. You'll notice (Assuming a closed system), that the total momentum is conserved.
- This law states, that in a closed system of objects, the total momentum of that system does not change no matter what.
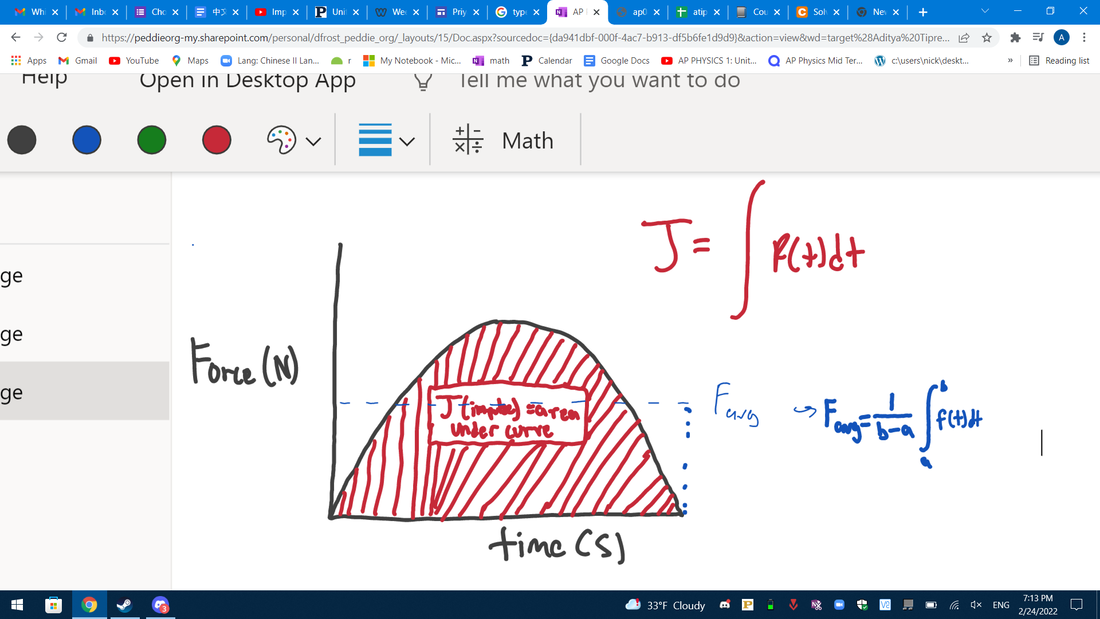
- Impulse is defined as change in momentum. Impulse is denoted in Physics equations as J. Formula is J=Favg(delta t). Impulse can also be calculated by finding the Area under a Force-time graph (Integral). As shown below. If given a graph Favg is average value of the graph. Below meaning under the Example question.
- Essentially, momentum is mass in motion. We can use kinematics, and its equations to find motion related variables such as velocity acceleration and distance traveled. Using Kinematics and motion, we can find the varibles necessary to plug into our energy equation (Most notably V). Through Energy equations/trasnfers, we can see how much force was applied by another object on another object. We can relate forces to momentum with the equation Favg(Delta t)= J. Rewriting J as pf-pi, you can see more clearly how force relates to momentum. That is how all these units tie into each other.
- EXAMPLE QUESTION.
IMPULSE GRAPHICAL REPRESENTATION:
GOOD VIDEOS:
https://www.youtube.com/watch?v=E13h1E_Pc00(Prof Dave Explains Impulse)
https://www.youtube.com/watch?v=M2xnGcaaAi4 (Prof Dave Explains Collision (Elastic+Inelastic))
https://www.youtube.com/watch?v=NIVNfI0RN2k(Orgo Chem Tutor Intro to momentum)
https://www.youtube.com/watch?v=p19i0gk3uFE (2D collision with Prof Matt Anderson)
https://www.youtube.com/watch?v=E13h1E_Pc00(Prof Dave Explains Impulse)
https://www.youtube.com/watch?v=M2xnGcaaAi4 (Prof Dave Explains Collision (Elastic+Inelastic))
https://www.youtube.com/watch?v=NIVNfI0RN2k(Orgo Chem Tutor Intro to momentum)
https://www.youtube.com/watch?v=p19i0gk3uFE (2D collision with Prof Matt Anderson)
